
曝光台 注意防骗 网曝天猫店富美金盛家居专营店坑蒙拐骗欺诈消费者
 图22 FMA光学动捕系统概念图
本文所讨论的是外部视觉导航方法,表1结合瑞士联邦理工学院、宾夕法尼亚大学和麻省理工学院三所高校光学动捕系统的性能参数,对比分析光学动捕系统的各项参数。
表2三所高校测试平台对比
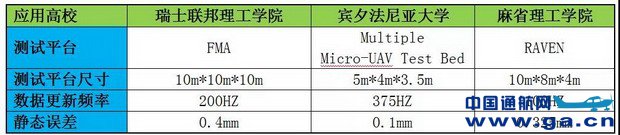 从表1可以看出,瑞士联邦理工学院、宾夕法尼亚大学贺麻省理工学院的测试平台分别为FMA、Multiple Micro-UAV Test Bed和RAVEN,这三所高校光学动捕系统完全满足多旋翼无人机的高机动飞行。
在多旋翼无人机的控制系统研究中,导航数据的准确性是控制算法得以实际应用的重要前提。在建筑物密集,丛林等环境下,GPS信号容易丢失,在室内环境下,GPS信号甚至完全不能用,所以基于光学动捕系统并与惯性导航组合后的数据为多旋翼无人机提供精确的位置和姿态等导航信息,提高系统的可靠性。
光学动捕系统可以精确测量三维空间的运动状态,它是基于计算机图形学原理,其实质是测量、跟踪和记录物体在三维空间中的运动轨迹。光学动系统的硬件组成包含高速红外摄像机、PC机、集线器等。如图23所示。。高速红外摄像机通过特殊红外标记物marker点捕捉多旋翼无人机的运动信息,然后以图像的形式记录下来,集线器识别摄像机捕捉的信号,负责将运动数据从高分辨率红外摄像机快速准确地传送到PC机,由PC机上专门进行数据解析的软件Active Center™进行处理,如图22所示,得到运动物体的位置信息,经过相机一连串的拍摄,可以得到运动载体的运动轨迹。  图23 关学动捕系统结构
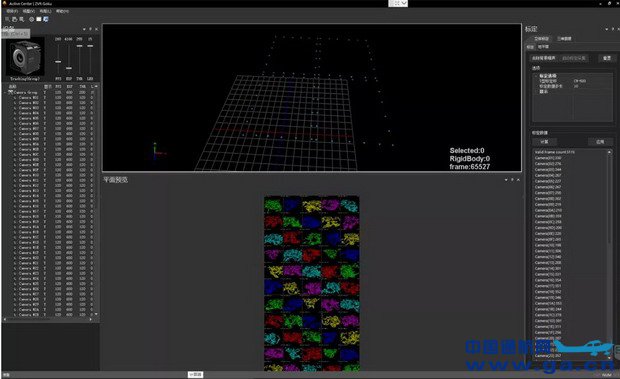 图24 光学动捕系统Active Center™
Active Center™软件界面
光学动捕系统导航信息的获取方法 位置信息。光学动捕系统可以识别安装多旋翼无人机上的marker点,进而得到其位置信息,经过相机一连串的拍摄,在地面站上可以直接显示多旋翼无人机的运动轨迹。 速度信息。速度信息可以经过位置信息进一步得到,光学动捕系统更新更新频率高,时间间隔很短,所以速度信息可以通过相邻两组位置信息的差值与位置数据更新的时间间隔相除得到。 姿态信息。系统不能直接得到姿态信息,需要进一步的计算,以下是光学动捕系统无人机测试平台的姿态解算求解过程。如图25为光学动捕系统的坐标系,图26为mrker点安装示意图,在多旋翼无人机上的A、B、C和D四个位置上分别安装四个表面具 有特殊光学物质的marker点,其中A点位于无人机的左前方,B点位于无人机的左后方,C点位于无人机的右后方,D点距离A点最近,A点、B点和C点三点共面与D点不共面,且它们之间距离关系为:AD<BD<CD。 三个姿态角的定义以及正方向规定如下:
● 航向角,即机体绕垂直方向运动,机体的纵轴在水平面上的投影与光学动捕系统X轴之间的家教。数值上以光学动捕系统X轴为起点,角度范围为0°~360°; ● 俯仰角,即机体绕横向水平轴转动产生的纵轴和纵向水平轴的夹角,俯仰角以水平轴为起点,向上为正,向下为负,角度范围为-90°~90°; ● 横滚角,即机体绕纵轴相对于铅锤平面的转角,从铅锤平面算起,左倾为负,右倾为正,角度范围为-180°~180°。  图25 光学动捕系统坐标系
 图26 marker点安装图
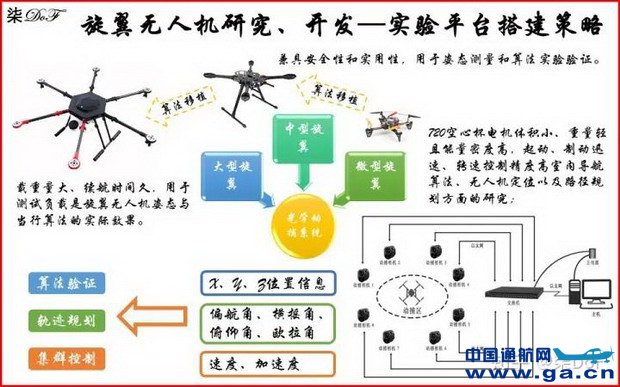
6 多旋翼无人机开发试验平台搭建策略推荐
 |


