
|
曝光台 注意防骗 网曝天猫店富美金盛家居专营店坑蒙拐骗欺诈消费者
实时解算六自由度位姿,利用计算机对捕捉到的图像数据进行处理,实时地解算出运动物体的六自由度位姿,即三自由度位置(X,Y, Z坐标)和三自由度姿态(俯仰角,偏航角和滚转角)。该系统也可以称为“室内定位系统”或“室内GPS”。 如图10,多架相机支持,覆盖范围广,光学室内定位系统采用智能相机,将反光球图像坐标传到主机,不同相机数目将产生不同的覆盖范围,相机越多,覆盖范围越大。 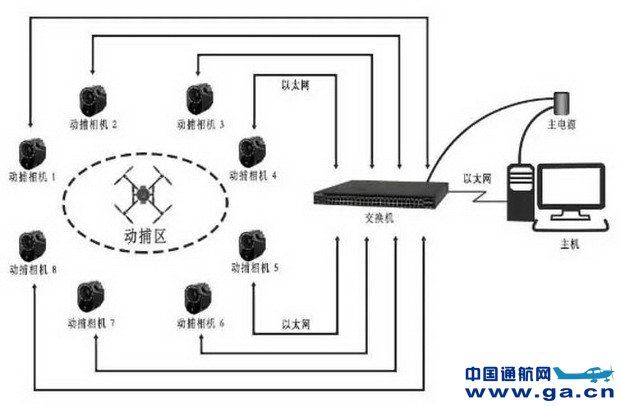 图10 光学动捕系统原理图
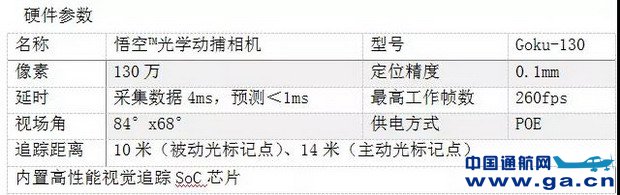  图11 光学动捕相机
 图12 T型标定杆辅助运动捕捉系统的校准
 图13 L型标定直角辅助运动捕捉系统中心点配置
软件参数
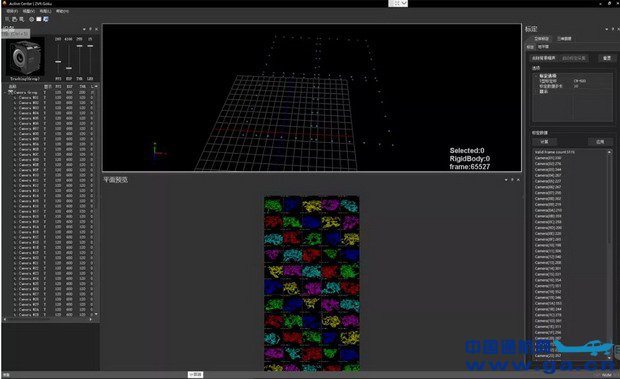 图14 光学动不系统软件界面
1、基础功能
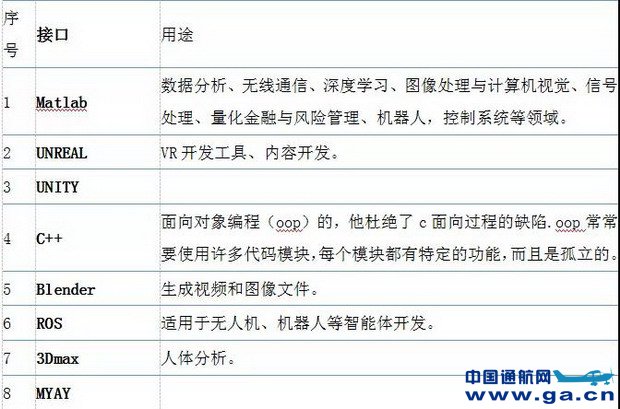
1)支持中文的多语言、多视角、多窗口3D显示操作界面 2)可同时对多达数百台Goku™ Camera进行集中管理 3)对视觉惯性同步控制器进行管理 4)高效实时视觉三维重建引擎 5)光学惯性深度融合引擎* 6)多达数百个智能光学刚体创建、标定、管理 7)实时物体追踪解算及绘制 8)数据记录及回放 9)空间捕捉区域实时测算及绘制 10)国际领先的IK算法* 11)实时数据流输出 12)数据记录及回放 *仅在惯性系统部署时应用 2、支持数据格式 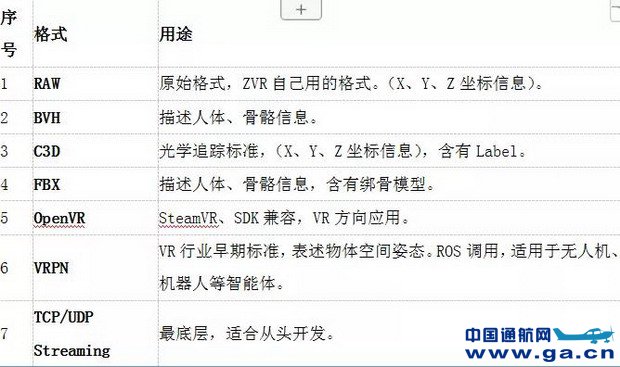 3、丰富的第三方接口
4.1、麻省理工学院
麻省理工学院(Massachusettes Institute of Technology,MIT)的RAVEN(Real-Time Indoor Auto no mous Vehicle Tese Encironment)实验室,内部装有18台运动捕捉摄像机,可以实现无人机的室内定位,实验室内还有多辆自主的地面小车,研究对象有Draganflyer V Ti Pro 多旋翼无人机和无人小车组成。MIT的无人机集群健康管理计划(UAV SWARM Health Management Project)主要研究多架无人机的飞行演示。图5为多架四旋翼无人机对目标进行连续搜索和跟踪实验,图16为多机协同和编队实验。
 图15 无人机目标搜索和跟踪实验 图16 十架无人机多机协同
4.2、斯坦福大学
斯坦福大学(Stanford University)的STARMAC(Stanford Testbed of Autonomous Rotorcraft for MultiAgent Control)项目是为了测试和验证多机算法和控制策略,它包含多个能够使用GPS和IMU传感器进行轨迹跟踪的四旋翼飞行器。Hoffmann G M团队基于斯坦福大学的试验台,首先将四旋翼无人机的非线性模型线性化,然后使用LQR控制方法设计了姿态控制器,使用滑模控制方法设计了高度控制器,并取得了良好的控制效果。
4.3、宾夕法尼亚大学
宾夕法尼亚大学的GRASP(General Robotics,Automation,Sensing and Perception)实验室对无人机的控制进行了大量研究,并基于光学动捕系统搭建了无人机测试平台,主要研究对象如图17所示。主要研究内容包括对多旋翼无人机的建模、多旋翼无人机自主飞行控制算法和多架无人机协同控制算法的研究。通过大量实验,GRASP实验室已经取得了很多创新成果,在该无人机测试平台下,无人机体现出很大的机动性,能够完成无人机集群航迹追踪、协同合作和编队飞行等测试,图18为多旋翼无人机协同飞行。
中国通航网 www.ga.cn
通航翻译 www.aviation.cn
本文链接地址:光学动捕系统在小型旋翼无人机开发过程中的作用(5)
|


