
|
曝光台 注意防骗 网曝天猫店富美金盛家居专营店坑蒙拐骗欺诈消费者
3、多旋翼无人机开发与外部视觉工具的关系
在对无人机飞行控制系统进行开发时,工程师需要对空中悬停、飞行中避障、机身姿态控制、定位、着陆等功能进行开发和测试,因此工程师需要一把工作在三维空间中的尺子,实时对无人机在空间中的高度、位置、姿态、抖动、延时等指标进行测量,以提升开发效率。在对无人机、无人车等智能体进行高精度编队时,工程师需要构建一个空间测量基准,该基准可以实时精确测量每个智能体在空间中的位置和姿态,并通过运行有控制软件(如ROS)的计算机下达编队指令。
无人机自主导航中,无人机运动状态识别是无人机航迹预测的基础,对无人机空管系统的构建具有重要意义。无人机的运动状态可简化为几个标准状态,如等速状态、等加速状态和协调转弯状态等。无人机的真实飞行过程可以认为是由不同运动状态组合或转换而成的。通过确定无人机的运动状态,可以对无人机航迹进行预测,进而评估无人机运行风险、建立监管系统和预警系统。但无人机真实运行环境复杂,观测数据在观测和数据链传输过程中包含一定噪声,难以通过简单的阈值确定无人机的运行状态。所以需要一个精准的尺子对其运动状态进行测量。 在开发视觉惯性里程计(VIO)无人机定位的算法时,需要对VIO定位数据进行验证调整定位算法的参数。在三维空间内需要有一把高效的“尺子”测量实际飞行的轨迹与精度以提高开发效率,如图7无人机在室内做8字运动,用红色的定位数据与绿色的光学动捕系统下真值的偏差来测量定位算法的稳定性。 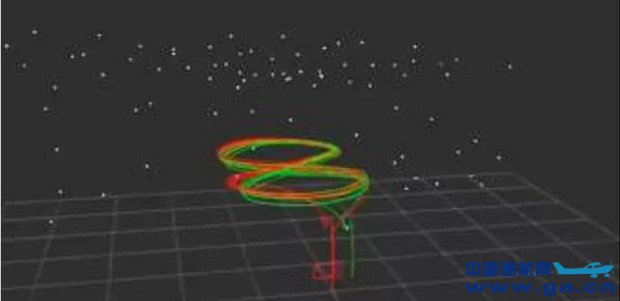
在无人机编队技术的研究在科研中被称为“多智能体协同控制”,研究者需要通过对无人机的定位,获取其在空间中的位姿,这种位置位姿信息主要是六自由度姿态数据,进行多智能体之间通讯的建立,最后通过控制决策系统根据智能体空间内的位姿完成系统控制。通过此技术可以再多个领域应用,如军事中的“蜂群”作战系统,管道、电力多机协同巡检,文娱行业的无人机编队表演,建筑行业的智能建造等。
定位无人机的空间位姿,是多智能体协同控制研究最为重要的部分,只有获取准确稳定的定位信息,才能良好的控制无人机。作为定位的传统方法,惯性测量单元(IMU)和惯导模块(INS)存在陀螺仪零点漂移严重,导致获取的姿态、速度等数据精度不够,存在误差累计,很难长时间独立工作。 在开展针对智能体(无人机、无人车)控制算法(经典控制算法、现代控制算法、协同控制算法等)的快速迭代设计时。如图8,第三方测量工具以亚毫米级的定位精度多对多的wifi通讯方式以及分布式计算模块的设计,保证了可接入终端节点的数量以及控制的实时性要求,为无人机、无人车等智能体运动轨迹规划与算法验证等提供动作数据基础。  图8 多智能体协同控制
SLAM系统分为几个模块:视觉里程计、后端优化、建图以及回环检测。
1)传感器信息读取,在视觉LSAM中主要为相机图像信息的读取和预处理。如果是在无人机中还有码盘、惯性传感器等信息的读取和同步。 2)视觉里程计(Visual Odometry,VO)视觉里程计的任务时估算相邻图像间相机的运动,以及局部地图的样子。VO又称为前段(Front End)。 3)后端优化(Optimization),后端接受不同时刻视觉里程计测量的相机位姿,以及回环检测的信息,对它们进行优化,得到全局一致的轨迹和地图。由于接在VO后,又称(Back End)。 4)回环检测(Loop Closing),回环检测判断机器人是否到达过先前的位置。如果检测到回环,它会把信息提供给后端进行处理。 5)建图(Mapping),它根据估计得轨迹,建立与任务要求对应的地图。 如图9,在运动轨迹定位A与MAP B的输出过程中需要一个第三方工具测量,测量出算法的差值△P以进行算法纠正。 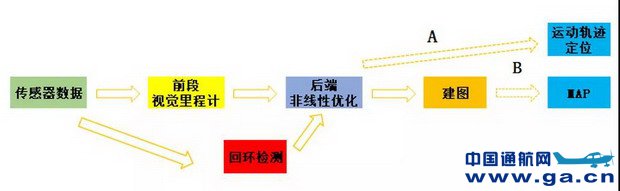 图9、整体视觉SLAM流程图
无人机的着陆指的是无人机在其自身导航设备的指引下,由其自身控制器控制其安全着陆的过程.传统无人机的着陆仅仅依靠GPS所实现的.但是,在实际工作中发现,单独的GPS很难为无人机的着陆提供精确的位置,且传统无人机无法在室内或者一些特定位置实现着落。视觉着陆是一种借用视觉导航的方法,可以实现无人机的辅助定位,并且能够实现无人机在特殊场合需求下的自动着陆。因此,研究基于视觉着陆技术的无人机的姿态与位置算法具有重要的理论意义和实际应用价值。在算法开发过程传感器提供无人机的位姿和位置信息是重要依据,而所提供位姿信息精准度需要一个外部视觉工具来测量其差值,高效的完善算法。
有哪些外部视觉工具? 光学动捕系统、宽带技术(Ultra-WideBand,UWB)定位,激光定位、超声波定位等。 外部视觉工具有哪些优劣势? 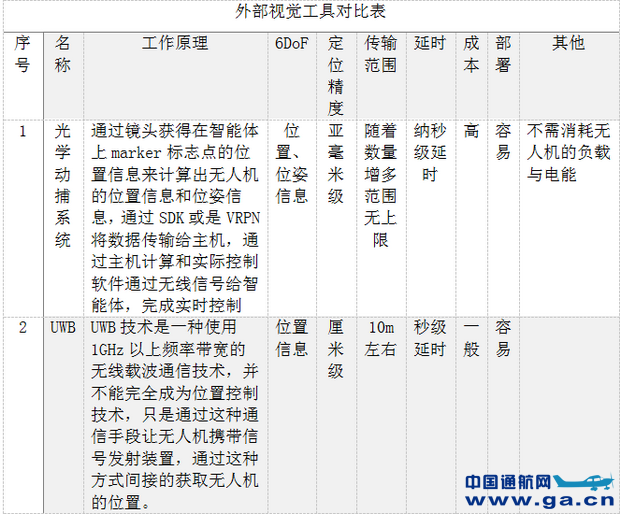 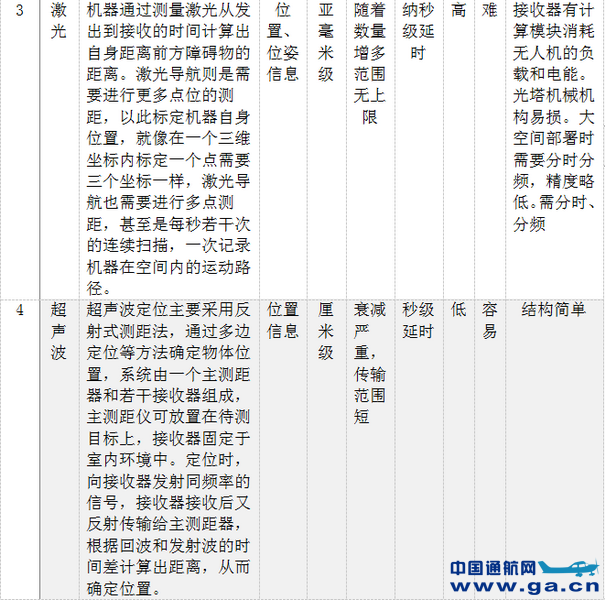 由对比表可以看出,在光学动捕是对多旋翼无人机室内自主控制与自主导航研究中光学动捕系统是最优质的选择。
悟空™光学动捕系统
工作原理 精准记录运动信息,基于计算机视觉原理,光学室内定位系统通过布置在空间中的多个红外摄像机捕捉区域内物体上反光标识点的运动信息,并以图像的形式记录下来。 中国通航网 www.ga.cn 通航翻译 www.aviation.cn 本文链接地址:光学动捕系统在小型旋翼无人机开发过程中的作用(4) |


