
|
曝光台 注意防骗 网曝天猫店富美金盛家居专营店坑蒙拐骗欺诈消费者
1.4、在线态势感知和自主决策
无人机在线态势感知的重点问题之一在于如何实现不确定条件下信息的快速获取与处理,从而实现飞行中再规划,也就是当接收到新的信息以及发生了非预见的事件时如何实时最优地更新预先制定的计划和导引策略,以应对数据链缺失、实时威胁以及复杂的故障和损伤等控制站无法实时干预的紧急情况。 采用类似有人驾驶飞机的方式进行自主着陆是无人机的发展趋势,其中精确的控制律设计对于无人机的安全着陆也必不可少。即使发生多起故障、存在严重扰动以及飞机动态数据存在不确定性的情况下,仍能在误差容许的范围使无人机安全着陆。 多无人机协同时将一组不同位置、不同价值、不同威胁程度的目标合理地分配给类型、价值和战斗力都不同的无人机,已达到整体作战效能最大、代价最小的目的。协同的前提条件是无人机平台间的通信和信息共享,无人机平台之间信息是高度分布的,无人机平台的运动以及通信拓扑的变化,以最小信息流为基础的多平台分散协调控制系统结构。如图4。 多无人机协同搜索也是多UAV协同控制的一个重要研究内容,多架UAV同时对一个不确定区域进行搜索,目的在于更快速、全面地获取搜索趋于的信息,降低环境的未知性。协同工作时考虑不同UAV飞行和探测传感器的约束,在不确定环境中采用协同自主控制的方法,从而达到整体任务效能的优化。 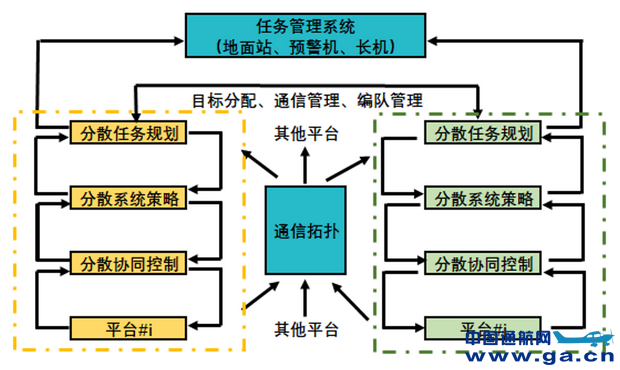 图4 分散化多机协同控制系统结构
2、无人机自主导航
无人机的自主导航是指无人机安全地从一个地点移动到另一个地点的过程。从技术层面可以分解成四个基本问题:
1、 What does the environment look like? 无人机必须知道环境的地图,才能在地图中找到路径。无人机确定环境的过程称为地图创建。 2、 Where am I? 无人机确定当前运动状态的过程叫做定位。 3、 Where am I going? 无人机在环境中确定下一个运动目标位置的过程称为运动决策。 4、 How do I get there? 在知道起点和终点的情况下,无人机规划如何到达目标的方法被称为运动规划。 无人机在未知复杂环境中的自主飞行问题主要有两个难点,一方面环境中存在不利于飞行控制的外部干扰,另一方面无人机缺少对环境的先验信息,需要在运动过程中建立环境地图以满足位姿估计和运动规划的需要。此时,上述几个问题将彼此关联,构成一个整体。其中定位与地图创建是自主导航中最基本的问题。依赖于具有足够精度的环境地图,而创建地图又以准确定位为基础。因此,定位与地图创建彼此依赖、不可分离,是未知环境自主导航中的“鸡和蛋”的问题。为此,研究人员在机器人科学中针对未知环境的导航问题提出了同时定位与地图创建(Simultaneous Localization And Mapping,SLAM)概念。为了获得全局一致的运动状态和题图估计,SLAM算法往往计算缓慢,无法满足无人机飞行控制中状态反馈的需要。因此在实际应用中,SLAM算法需要与高输出频率的快速运动增量估计方法(或称局部位姿估计方法)相结合。针对未知环境探索的任务,运动决策和运动规划问题关系紧密,可予以合并。此外,控制系统受到环境中的位置扰动影响,需要研究无人机在存在外部干扰情况下的控制问题。 如图5,以系统框图形式描述了无人机在未知复杂环境中自主导航和飞行控制问题的整体框架。框架包含五个主要部分:姿态控制、快速导航方法、SLAM算法、运动决策与规划以及轨迹跟踪,上述五个部分构成一个完整回路。其中快速导航方法根据传感器获得的无人机运动相关信息和环境信息估计运动增量,SLAM算法在此基础上计算全局状态和地图。两种估计方法通过简单的坐标变换即可得到以较高频率输出的全局运动状态估计。根据未知环境自主探索的任务要求设计合理的运动决策与规划方法,输出期望运动路径。然后针对无人机的运动特点,以轨迹跟踪的方法计算期望姿态,再通过高精度的姿态控制方法解决包含未知扰动的无人机姿态控制问题。 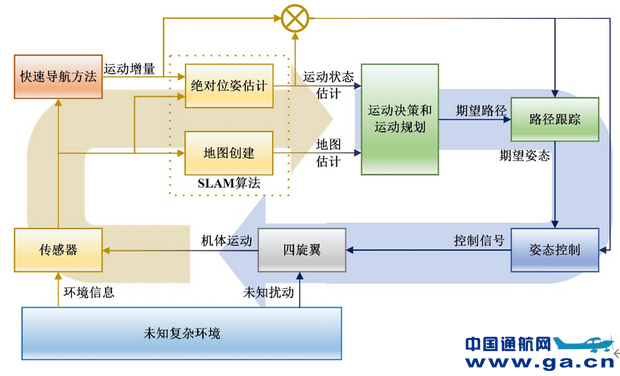 图5 无人机在未知环境中自主导航和飞行控制问题的方法框图
无人机的自主导航和控制问题涉及的技术领域很广,需要对以下问题进行研究:
2.1、无人机的姿态控制方法研究
中国通航网 www.ga.cn
通航翻译 www.aviation.cn
本文链接地址:光学动捕系统在小型旋翼无人机开发过程中的作用(2)
|


