
|
ЖШ№вМЁ ЧўТв·АЖӯ НшЖШМмГЁөкё»ГАҪрКўјТҫУЧЁУӘөкҝУГЙ№ХЖӯЖЫХ©Пы·СХЯ
ХӘТӘЈәХл¶ФОЮИЛ»ъХмІмУ°ПсөДДҝұкјмІвОКМвЈ¬СРҫҝТ»ЦЦ»щУЪәтСЎЗшУтөДОЮИЛ»ъХмІмУ°ПсДҝұкјмІвјјКхЎЈКЧПИО§ИЖОЮИЛ»ъУ°ПсМШөгЈ¬·ЦОцБЛ»щУЪәтСЎЗшУтөДДҝұкјмІвјјКхөДУЕКЖЎЈИ»әуҪйЙЬБЛёГјјКхөД№ШјьІҪЦиІў№йДЙБЛёчІҪЦиөДЦчБчЛг·ЁЎЈЧоәуЧЬҪбБЛБҪЦЦҪПОӘіЙКмөДәтСЎЗшУтДҝұкјмІвҝтјЬ:»щУЪDPMөДәтСЎЗшУтДҝұкјмІвҝтјЬәН»щУЪҫн»эЙсҫӯНшВзөДәтСЎЗшУтДҝұкјмІвҝтјЬЈ¬НЁ№э¶ФПЦУРЛг·ЁөД·ЦОцЈ¬ОӘПВТ»ІҪёДҪшЛг·ЁМṩБЛЛјВ·ЎЈ
ПаұИУЪҙ«НіХҪіЎХмІм·ҪКҪЈ¬ОЮИЛ»ъХмІмДЬ№»ФЪұЬГвИЛФұЙЛНцөДЗйҝцПВМṩҪьКөКұөДЗйұЁРЕПўЈ¬ЦрҪҘіЙОӘТ»ЦЦЦчБчөДХмІмКЦ¶ОЎЈОЮИЛ»ъ»сөГХҪіЎХмІмУ°ПсКэҫЭәуЈ¬НЁ№эДҝұкјмІвјјКхҙҰАнХмІмУ°ПсЈ¬КөПЦ¶ФХҪіЎөдРНДҝұкөД¶ЁО»Ул·ЦАаЈ¬ёщҫЭјмІвРЕПўЈ¬ҝЙТФЧјИ·ҙт»чөР·ҪДҝұкЎўХЖОХөРОТІҝКрЎўФцЗҝХҪіЎЕР¶ПБҰЎўМбёЯЧчХҪР§ВКЎЈ
ДҝұкјмІвјјКхКЗТ»ЦЦ»щУЪДҝұкјёәОУлНіјЖМШХчөДНјПсК¶ұр·ЦёојјКхЎЈФзЖЪөДЛг·ЁУРЦЎІо·ЁЎўұіҫ°Іо·ЁЎў№вБч·ЁөИЈ¬ЦчТӘАыУГЦЎјдРЕПў¶ЁО»іцФЛ¶ҜДҝұкөДҝХјдО»ЦГЈ¬І»Йжј°¶ФДҝұкАаұрөДЦЗДЬ·ЦАаЈ¬ИзРиДҝұкЕР¶Б»№ТӘМнјУДҝұкК¶ұрДЈҝйЈ¬№эіМ·ұЛцИЯУаЎЈҙЛНвЈ¬ОЮИЛ»ъХмІмУ°ПсПа¶ФУЪТ»°гСРҫҝөДДҝұкјмІвУ°ПсУРЧФЙнөДМШКвРФЈә
ЈЁ1Ј©іЙПс»·ҫі¶сБУЎўДҝұкұіҫ°ФЛ¶ҜЗТёҙФУЈ»
ЈЁ2Ј©ДҝұкПа¶Фұіҫ°№эРЎЈ¬¶ЁО»А§ДСЈ»
ЈЁ3Ј©ДҝұкМШХчІ»ГчПФЈ¬К¶ұрДС¶ИҙуЈ»
ЈЁ4Ј©КөјКУҰУГРиЗу¶ФЛг·ЁКөКұРФЎўВі°фРФТӘЗуёЯЎЈ
ТтҙЛЈ¬ҝмЛЩВі°фөДҪшРРОЮИЛ»ъХмІмУ°ПсДҝұкјмІвіЙОӘОЮИЛ»ъРЕПўҙҰАнөД№ШјьЈ¬¶ш»щУЪәтСЎЗшУтЈЁRegion ProposalЈ©өДДҝұкјмІвјјКхХэ·ыәПТФЙПТӘЗуЈә
(1Ј©¶ФөҘ·щ»төҘЦЎУ°ПсҪшРРјмІвЈ¬І»КЬФЛ¶Ҝұіҫ°ПЮЦЖЈ»
ЈЁ2Ј©әтСЎЗшУтјмІвЈ¬ЛхРЎҙэјЖЛгҙ°ҝЪКэБҝЈ¬ФЛЛгЛЩ¶ИҝмЈ»
ЈЁ3Ј©МШХчМбИЎҪөО¬Ул·ЦАаЖчПаҪбәПЈ¬К¶ұр¶ЁО»өДҫ«¶ИУлЛЩ¶ИёЯЈ»
ЈЁ4Ј©ХыМеҝтјЬјтөҘЗеОъИзНј1ЛщКҫЈ¬ҝЙТФёщҫЭјмІвТӘЗу¶ФәтСЎЗшУтјмІвЎўМШХчМбИЎЎў·ЦАаЖчИэёцјмІвҪЧ¶ОҪшРРұд»ҜЈ¬ұгУЪЛг·ЁөДёДҪшУлЖА№АЎЈ
ТтҙЛ¶Ф»щУЪәтСЎЗшУтөДОЮИЛ»ъХмІмУ°ПсДҝұкјмІвјјКхҪшРРСРҫҝҫЯУРЦШТӘТвТеЈ¬ҪУПВАҙҪ«¶ФЖдИэёцҪЧ¶ОҪшРРҪйЙЬәНЛг·ЁёЕКцЎЈ
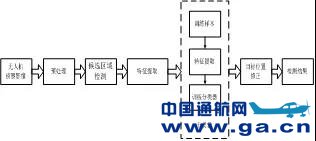 Нј1 »щУЪәтСЎЗшУтөДДҝұкјмІвҝтјЬ
1 әтСЎЗшУтјмІв
әтСЎЗшУтјмІвКЗАыУГНјПсСХЙ«ЎўұЯФөЎўОЖАнөИМШХчЈ¬СЎФсРФЛСЛчДҝұкО»ЦГөД·Ҫ·ЁЎЈУЙУЪДҝұкҝЙДЬіцПЦФЪНјПсөДИОәОО»ЦГЈ¬ҙуРЎЎўіӨҝнұИАэІ»¶ЁЈ¬ТтҙЛРиТӘёщҫЭТ»¶Ё·Ҫ·ЁҪ«НјПс·ЦёоіЙёчЦЦіЯҙзөДЧУНјПсЧчОӘәтСЎЗшУтЈ¬ұгУЪДҝұк¶ЁО»УлМШХчМбИЎЎЈ
¶шёЯР§өД·ЦёоәтСЎЗшУтіЙОӘәтСЎЗшУтјмІвҪЧ¶ОөДСРҫҝЦШөгЎЈҙ«НіЗоҫЩЛСЛчЈЁExhaustive SearchЈ©Лг·ЁТІҝЙТФЛгЧчТ»ЦЦМШКвөДәтСЎЗшУтјмІв·Ҫ·ЁЈ¬ЖдАыУГјёЦЦіЯҙзПа¶Ф№М¶ЁөДҫШРОҙ°ҝЪЈ¬ЦрРРБР»тЛж»ъ¶ФХы·щНјПсҪШИЎЧУНјПсЈ¬КөПЦ¶ФНјПсөДұйАъЎЈХвЦЦГӨДҝЗоҫЩөДЗшУтЛСЛч·Ҫ·ЁКұәДіӨЎўИЯУаҙуЈ¬СПЦШУ°ПмХыМеДҝұкјмІвЛг·ЁөДФЛРРЛЩ¶ИУлРФДЬЈ¬ёьОЮ·ЁВъЧгОЮИЛ»ъЗйұЁҙҰАнөДКөКұРФЈ¬ТтҙЛОӘМбёЯјмІвР§ВКРиТӘТ»ЦЦјмІвІЯВФ¶ФЗшУтЛСЛчҪшРРТэөјЈ¬ұЬГвёҙФУөДФЛЛгЎЈ
ПЦУРөДҝЙУГУЪәтСЎЗшУтјмІвөДЛг·ЁУРәЬ¶аЈ¬Jan HosangөИҪ«ХвР©Лг·Ё·ЦОӘ·ЦЧйЗшУтСЎФс·ЁЈЁGrouping proposal methodsЈ©әНҙ°ҝЪЖА·ЦЗшУтСЎФс·ЁЈЁWindow scoring proposal methodsЈ©БҪҙуАаЎЈ·ЦЧйЗшУтСЎФс·ЁҪ«НјПсПИ·ЦёоіЙРЎҝйЈ¬Лжәу°ҙХХДіЦЦФӯФтЧйәПіЙРиТӘөДәтСЎЗшУтЎЈёщҫЭІъЙъәтСЎЗшУт·ҪКҪөДІ»Н¬Ј¬·ЦЧйЗшУтСЎФс·ЁУЦПё·ЦОӘі¬ПсЛШ·ЁЈЁSuperpixels, SPЈ©ЎўПсЛШ·Цёо·ЁЈЁGraph Cut, GCЈ©әНұЯФөВЦАӘ·ЁЈЁEdge Contours, ECЈ©ЎЈҙ°ҝЪЖА·ЦЗшУтСЎФс·ЁФЪНјПсЙПҪШИЎҙуБҝөДЗшУтҙ°ЈЁWindowsЈ©Ј¬Іў°ҙХХУлДҝұк№ШПөөДҙуРЎҪшРРҙт·ЦЈ¬СЎФс·ЦКэёЯөДЙъіЙәтСЎЗшУтЎЈНј2ПкПёГиКцБЛХвЦЦ·ЦАаІгҙОІўБРҫЩБЛЦчТӘЛг·ЁЎЈ
 Нј2 ЦчТӘәтСЎЗшУтјмІвЛг·Ё·ЦАа
ЙПКцЛг·ЁЦРұИҪПҫЯУРҙъұнРФөДУРЈәSeletive SearchЎўEdge BoxesәНMCGЎЈ
Seletive SearchөДЦчТӘЛјВ·КЗК№УГНјПс·ЦёоЛг·ЁҪ«НјПс·ЦёоіЙРЎЗшУтЈ¬јЖЛгПаБЪРЎЗшУтөДСХЙ«ЎўОЖАнөИМШХчөДПаЛЖ¶ИЈ¬ІўИЪәППаЛЖ¶ИЧоёЯөДБҪёцЗшУтЈ¬ЦШёҙПаЛЖ¶ИјЖЛгәНИЪәП№эіМЦұөҪәПіЙХыХЕНјПсЈ¬әПіЙ№эіМЦРІъЙъөДёчЦЦіЯ¶ИЗшУтјҙОӘәтСЎЗшУтЎЈ
Edge BoxesКЧПИК№УГҪб№№»ҜҝмЛЩұЯФөјмІвЛг·ЁөГөҪұЯФөНјПсЈЁEdge Probability mapЈ©Ј¬АыУГ·Зј«ҙуЦөТЦЦЖЈЁNon-maximum Suppression, NMSЈ©ПЎКиұЯФөНјПсЈ¬И»әуҪ«ұЯФөөгЧйіЙұЯФөЧйЈЁEdge GroupЈ©ІўјЖЛгЧйјдөДПаЛЖ¶ИЈ¬Ҫш¶шөГөҪҝтДЪәНУлҝтұЯФөЦШөюөДБҪЧйВЦАӘКэЈ¬ЧоәуёщҫЭВЦАӘКэ¶ФЗшУтҝтҪшРРҙт·ЦЈ¬ёщҫЭ·ЦКэИ·¶ЁәтСЎЗшУтЎЈ
MCGУлEdge BoxesТ»СщПИУГҪб№№»ҜҝмЛЩұЯФөјмІвЛг·ЁөГөҪұЯФөНјПсЈ¬АыУГ·ЦЛ®БлЛг·ЁөГөҪВЦАӘНјЈ¬ЛжәуЙъіЙі¬¶ИБҝВЦАӘУіЙдНјЈЁUCMЈ©Ј¬Ц®әуНЁ№эІгҙО·ЦёоөГөҪЗшУтјҜІўУГЛж»ъЙӯБў·ЦАаЖчёщҫЭіЯ¶ИЎўО»ЦГәНұЯФөЗҝ¶ИөИМШХч¶ФЗшУтҪшРРЕЕРтЈ¬Ҫш¶шСЎіц·ыәПТӘЗуөДәтСЎЗшУтЎЈ
Ві°фРФЈЁRobustЈ©ЎўКөКұРФәНХЩ»ШВКЈЁRecallЈ©КЗЖАјЫәтСЎЗшУтСЎФс·Ҫ·ЁөДТ»°гұкЧјЎЈОЮИЛ»ъХмІм»·ҫіёҙФУөјЦВіЙПс№эіМЦРҝЙДЬҙжФЪёчЦЦИЕ¶ҜЈ¬ТтҙЛБјәГөДВі°фРФәНҪПёЯөДХЩ»ШВККЗұЈЦӨЗшУтСЎФсЛг·ЁФЪКөјКУҰУГЦРҫЯұёёЯЦКБҝДҝұкјмІвР§№ыөД№ШјьЎЈН¬КұМбЙэЗшУтСЎФсҪЧ¶ОөДФЛРРЛЩ¶ИЈ¬ТІ»бҪөөНХыМеДҝұкјмІв№эіМөДКұәДЎЈ
ЎЎ
ЦР№ъНЁәҪНш www.ga.cn
НЁәҪ·ӯТл www.aviation.cn
ұҫОДБҙҪУөШЦ·Јә»щУЪәтСЎЗшУтөДОЮИЛ»ъХмІмУ°ПсДҝұкјмІвјјКхСРҫҝ
|


