
|
ЖШ№вМЁ ЧўТв·АЖ НшЖШМмГЁµкё»ГАЅрКўјТѕУЧЁУЄµкїУГЙ№ХЖЖЫХ©Пы·СХЯ
2 МШХчМбИЎ
МШХчМбИЎКЗДї±кјмІвЦРµД№ШјьІЅЦиЈ¬ЖдЦКБїЦ±ЅУУ°ПмµЅЧоЦХјмІвЅб№ыµДЧјИ·РФЎЈМШХчМбИЎіЈУГµДНјПсМШХчУРСХЙ«МШХчЎўОЖАнМШХчЎўРОЧґМШХчµИЎЈКЬПЮУЪОЮИЛ»ъКµјКХмІмМхјюЈ¬У¦УГУЪёґФУ¶аДї±к±іѕ°ПВОЮИЛ»ъХмІмДї±кјмІвµДМШХчМбИЎЛг·ЁУ¦¶ФіЯ¶ИЎўББ¶ИЎўРэЧЄЎўХЪµІєНФлЙщµИёЙИЕѕЯУРЅПЗїµДВі°фРФЈ¬¶шґ«НіДї±кјмІвјјКхґуІї·ЦНЁ№эИЛ№¤ЙијЖМбИЎНјПсМШХчЈ¬іЈјыµДЛг·ЁУРЈє
HarrisЅЗµгјмІвЛг·ЁТФМ©АХХ№їЄКЅ№№ЅЁПсЛШµгБЪУтДЪµДБ¬РшЗъГжЈ¬јЖЛгЛщУРПсЛШµгµДОўЙМЖЅ·ЅєНЈ¬ІЙУГЖдЦРµДЧоґуЦµєНЧоРЎЦµЧчОЄЕР¶ПМШХчЅЗµгµДПФЦшРФТАѕЭЈ¬ёГЛг·ЁДЬЅ«јмІв·ЅПтА©Х№µЅЛщУР·ЅПтЙПЎЈІ»ЧгЦ®ґ¦КЗјЖЛг№эіМёґФУЈ¬ЗТИЛОЄЙи¶ЁµДіхКјгРЦµ¶ФЛг·ЁµДОИ¶ЁРФѕЯУРѕц¶ЁРФЧчУГЎЈ
SIFTЈЁScale Invariant Feature TransformЈ©МШХчјмІвЛг·ЁКЗПЦЅЧ¶ОЅПОЄіЙКмµДТ»ЦЦЛг·ЁЈ¬КЧПИНЁ№эёЯЛ№ЖЅ»¬№№ЅЁёЯЛ№іЯ¶ИїХјдЈ¬ФЪЖдЦРЅшРРј«ЦµµгјмІвІўЅ«ЖдЧчОЄМШХчµгЈ¬ѕ№эМШХчµгГиКцјґїЙУГУЪНјПсЖҐЕдЎЈёГЛг·Ё¶ФУЪХХ¶И±д»»ЎўіЯ¶ИєНРэЧЄ±д»»ЎўКУµг±д»ЇТФј°ФлЙщУ°Пс¶јѕЯ±ёТ»¶ЁµДВі°фРФЈ¬МШХчµгЗш·ЦБ¦ЅПєГЈ¬РЕПўБї·бё»Ј¬ЖҐЕдµДЧјИ·¶ИЅПёЯЈ¬µ«УЙУЪЛг·ЁРиТЄ№№ЅЁіЯ¶ИїХјдІўјЖЛгИ«ѕЦј«ЦµЈ¬јЖЛгБїґуЈ¬ОЮ·ЁВъЧгКµК±ТЄЗуЎЈ
HOGЈЁHistogram of Oriented GradientЈ©МШХчјмІвЛг·ЁКЗТ»ЦЦАыУГѕЦІїНјПсМЭ¶И·ЅПтЦ±·ЅНјМШРФМбИЎНјПсМШХчµД·Ѕ·ЁЈ¬ДЬ№»јхИхѕЦІї№вХХЎўТхУ°¶ФМШХчМбИЎµДУ°ПмЈ¬јЖЛгПсЛШМЭ¶И»сИЎНјПсВЦАЄРЕПўЎЈКЧПИЅ«НјПс»®·ЦіЙ¶аёцCellїйЈ¬ГїёцCellїйУЙКэёцПсЛШµгЧйіЙЈ¬НіјЖCellїйµДМЭ¶ИЦ±·ЅНјЈ¬ФЩЅ«КэёцCellїйЧйєПіЙBlockЗшУтЈ¬ёщѕЭГЬ¶И¶ФЗшУтЦРµДCellїй№йТ»»ЇЈ¬ЗшУтЦРЛщУРCellїйµДМЭ¶ИМШХчЧйєПіЙBlockМШХчЈ¬Н¬АнНјПсЦРЛщУРBlockМШХчЧйєПіЙНјПсМШХчЈ¬HOG¶Ф№вХХєНЗбОўРО±дУРТ»¶ЁµДТЦЦЖДЬБ¦Ј¬їЙТФєЬєГµД±нХчѕЦІїПсЛШЦ®јдµД№ШПµЎЈУлЖдЛьґ«НіМШХчМбИЎЛг·ЁПаН¬Ј¬јЖЛгИЯі¤µјЦВµДКµК±РФІоКЗЛг·ЁµДЦчТЄИ±ПЭЎЈ
SURFЈЁSpeeded up Robust FeaturesЈ©јмІвЛг·ЁІЙУГHessianѕШХу¶ФSIFTЛг·ЁЦРёЯЛ№іЯ¶ИїХјд№№ЅЁ№эіМЅшРРЅьЛЖґ¦АнЈ¬АыУГ»э·ЦНјПсєНёьµНО¬¶ИµДГиКцЧУПтБїјт»ЇЛг·ЁМе»эЈ¬УРР§јхЙЩБЛјЖЛгБїЈ¬ГЦІ№БЛSIFTЛг·ЁФЛРРЛЩ¶И»єВэµДИ±µгЎЈµ«КЗФЪІЙУГHessianѕШХу»сµГј«ЦµєуЈ¬ФЪЗуИЎМШХчµгЦч·ЅПтЅЧ¶О№эУЪТААµѕЦІїЗшУтПсЛШµгµДМЭ¶И·ЅПтЈ¬їЙДЬ»бФміЙОуЖҐЕдЎЈ¶шЗТУЙУЪЛг·ЁІЙУГТ»ЦЦЅьЛЖґ¦АнКµПЦМШХчµгµДјмІвЈ¬µјЦВЖд¶ФУЪёчЦЦ±д»»µДВі°фРФПа¶ФПВЅµЎЈ
Ц®єу»№УРРн¶а»щУЪSIFTєНSURFёДЅшµДМШХчјмІвЛг·ЁЈ¬ИзBRIEFЈЁBinary Robust Independent Elementary FeaturesЈ©јмІвЛг·ЁЎўORBЈЁOriented FAST and Rotated BRIEFЈ©јмІвЛг·ЁЎўBRISKЈЁBinary Robust Invariant Scalable KeypointsЈ©јмІвЛг·ЁЎў·ЗПЯРФМШХчјмІвµД·зКЅМШХчЈЁKAZEЈ©Лг·ЁЈ¬Ві°фРФєНКµК±РФ¶јУРґу·щМбёЯЈ¬µ«КЗґ«НіМШХчМбИЎЛг·ЁУ¦УГУЪОЮИЛ»ъХмІмДї±кјмІвК±Ј¬Ві°фРФЎўКµК±РФєНЧјИ·РФµИґ«НіЦё±кТАИ»ОЮ·ЁВъЧгКµјКРиЗуЈ¬ѕЯМе±нПЦОЄТФПВЛДёц·ЅГжЈє
ЈЁ1Ј©МбИЎµЅµДМШХчРЕПў№эУЪµҐТ»Ј¬ОЮ·ЁНкХыµД±нКцДї±кЈ»
ЈЁ2Ј©їЙ·ЦРФЅПІоЈ¬·ЦАаЖчОЮ·ЁЧјИ·µД¶ФёґФУ±іѕ°ПВµДДї±кЅшРР·ЦАаЈ»
ЈЁ3Ј©·є»ЇРФІ»ЧгЈ¬І»Н¬µДМШХчККУГУЪІ»Н¬µДУ°ПсКэѕЭЈ¬Т»°гИЛОЄСЎИЎµДМШХч¶јУРЧФЙнМШ¶ЁµДУ¦УГ±іѕ°Ј»
ЈЁ4Ј©МШХчЙијЖ№¤ЧчёґФУЈ¬СР·ўЦЬЖЪі¤Ј¬ЗТЙијЖ№¤ЧчРиТЄЅПЗїµДЧЁТµ±іѕ°ЎЈ
ЛжЧЕЙо¶ИС§П°µДІ»¶П·ўХ№Ј¬»щУЪЙо¶Иѕн»эЙсѕНшВзЈЁconvolution neural networkЈ¬CNNЈ©µДДї±кјмІвЛг·ЁµГµЅЙоИлСРѕїЎЈФЪНјПсМШХчМбИЎ·ЅГжЈ¬ѕн»эЙсѕНшВзѕЯУРГчПФУЕКЖЈ¬Зш±рУЪИЛ№¤ЙијЖµДМШХчЈ¬ЖдАыУГґуБїНјЖ¬КэѕЭС§П°µЅ·ЗИЛ№¤ЙијЖµДМШХчЈ¬ЅвѕцБЛУЙУЪИЛОЄСЎИЎµДМШХчРЕПўµҐТ»µјЦВµДёґФУ±іѕ°ПВВі°фРФІ»ЗїµДОКМвЈ¬МбЙэУ°ПсДї±кјмІвР§№ыЎЈ
3 ·ЦАаЖч
·ЦАаКЗДї±кјмІвµДєЛРДЦ®Т»Ј¬¶ш·ЦАаЖчµДСЎФсКЗ·ЦАаµДЦШµгЎЈЅ«МШХчМбИЎЦеõЅµДМШХчЛНИл·ЦАаЖчЈ¬ЕР¶ПіцНјПсЦРДї±кАа±рЈ¬јґ»щ±ѕНкіЙДї±кµДґЦјмІвЎЈИзНј3ЛщКѕОЄДї±кјмІвЦР·ЦАаЖчЅшРР·ЦАаµД№эіМЎЈ
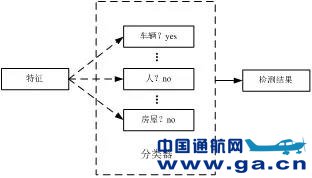 Нј3 ·ЦАаКѕТвНј
Дї±кјмІв·ЦАа№эіМЧоіЈУГµД·ЦАаЖчУРЈєЦ§іЦПтБї»ъЈЁsupport vector machine,јтіЖ SVMЈ©ЎўBoostingЎўЛж»ъЙБЦЈЁRandom Forest, RFЈ©ЎўИЛ№¤ЙсѕНшВзЈЁArtificial Neural Network, ANNЈ©µИЎЈ
SVM·ЦАаЖчКЗТФНіјЖС§П°АнВЫОЄ»щґЎµДС§П°·Ѕ·ЁЈ¬ёщѕЭЅб№№·зПХЧоРЎ»ЇЧјФтЈ¬ТФЧоґу»Ї·ЦАајдёф№№ФмЧоУЕ·ЦАаі¬ЖЅГжАґМбёЯС§П°»ъµД·є»ЇДЬБ¦Ј¬ЅПєГµШЅвѕцБЛ·ЗПЯРФЎўёЯО¬КэЎўѕЦІїј«РЎµгµИОКМвЎЈ¶ФУЪ·ЦАаОКМвЈ¬Ц§іЦПтБї»ъЛг·ЁёщѕЭЗшУтЦРµДСщ±ѕјЖЛгёГЗшУтµДѕцІЯЗъГжЈ¬УЙґЛИ·¶ЁёГЗшУтЦРОґЦЄСщ±ѕµДАа±рЎЈґ«НіНјПсДї±кјмІвЦРґу¶аУ¦УГSVM·ЦАаЖчЅшРРМШХч·ЦАаЈ¬И»¶шИ±К§КэѕЭГфёРєН¶Ф·ЗПЯРФОКМвГ»УРНЁУГЅвѕц·Ѕ°ёИФКЗј±ґэЅвѕцµДОКМвЎЈ
Boosting·ЦАаЖчКЗТ»ЦЦјЇєП·ЦАаЖчјґНЁ№эЧйєПјёёцИх·ЦАаЖчКµПЦЗї·ЦАаЖчµДРФДЬЎЈЖд»щ±ѕЛјПлКЗЈєСµБ·КэёцИх·ЦАаЖчЈ¬ФЪµЪТ»ёцИх·ЦАаЖчЦРКдИлПаН¬ИЁЦµСµБ·Сщ±ѕЈ¬ФЪЦ®єуµД·ЦАаЖчµьґъ№эіМЦРЈ¬І»¶ПФцјУХэИ·Сщ±ѕИЁЦШЦ±µЅµьґъНкіЙЈ¬ЧоєуЅ«ЛщУРИх·ЦАаЖчЧйєПіЙЗї·ЦАаЖчУГУЪ·ЦАаѕцІЯЎЈAdaboostЈЁAdaptive BoostingЈ©Лг·ЁѕЯМеКµПЦБЛBoosting·ЦАаЖчХвТ»ЛјПлЈ¬ЗТѕЯУРѕ«¶ИёЯЎўї№№эДвєПДЬБ¦ЗїЎў№№ЅЁјтµҐБй»оµИУЕµгЈ¬ґуБїУ¦УГУЪ°ьАЁДї±кМШХч·ЦАаµИёчЦЦ·ЦАаіЎѕ°ЎЈИх·ЦАаЖчµДСЎФсКЗУ°ПмBoosting·ЦАаЖч·ЦАаР§№ыµД№ШјьЈ¬ТІКЗЦЖФјЖд·ўХ№µДЧиБ¦ЎЈ
Лж»ъЙБЦКЗУЙ¶аёцѕцІЯКч·ЦАаЖчЈЁClassification and Regression Tree, CARTЈ©ЧйіЙµДЧЬ·ЦАаЖчЎЈОЄґпµЅМбЙэ·є»ЇРФµДДїµДЈ¬·ЦАаЖчСµБ·№эіМЦРНЁ№эЛж»ъУР·Е»ШµДІЙСщ»сИЎЧУ·ЦАаЖчСµБ·Сщ±ѕјЇЈ¬ЛжєуЅ«МбИЎµЅµДМШХч°ґТ»¶Ё±ИАэЛж»ъОЮ·Е»ШµДІЙСщАґСµБ·ЧУ·ЦАаЖчЅЪµгЎЈЛж»ъЙБЦПаЅПУЪЖдЛь·ЦАаЖчѕЯУРСµБ·ЛЩ¶ИїмЎў·є»ЇДЬБ¦ЗїЎўКµПЦјтµҐµИУЕµгЈ¬ЗТїЙТФУРР§їЛ·юСщ±ѕК§євЎўМШХч¶ЄК§ЎўМШХчО¬¶И№эёЯµДОКМвЎЈµ«ФЪКэѕЭФлЙщЅПґуµДЗйїцПВИФ»б·ўЙъ№эДвєПµДОКМвЈ¬ґЛНвЈ¬ёГДЈРНДЪІїІ»їЙїШЈ¬Ц»ДЬНЁ№эНвІїІОКэЅшРРµчЅЪЎЈ
ЎЎ
ЦР№ъНЁєЅНш www.ga.cn
НЁєЅ·Тл www.aviation.cn
±ѕОДБґЅУµШЦ·Јє»щУЪєтСЎЗшУтµДОЮИЛ»ъХмІмУ°ПсДї±кјмІвјјКхСРѕї(2)
|


