
|
曝光台 注意防骗 网曝天猫店富美金盛家居专营店坑蒙拐骗欺诈消费者
2.2 群体动物感知定位机理
自然界中,鸟群编队飞行的现象比较常见,其群聚行为包含自然社会、回避、探测以及防御掠夺等。鸟群经常以“V”、“J”或梯形的线性编队飞行,其中“J”形和 梯形编队是“V”形编队的变形,线性编队行为可以通过鸟群成员间的视觉信息交互提高导航能力。
无人机编队飞行形式与生物群体社会性行为存在相似性,通过研究生物群体行为规律,为无人机编队飞行提供关键有效理论及技术思考,其中将生物集群编队理论与无人机集群相对协同导航的研究在不断推进。以鸽群为例,在导航方式方面,鸽子在旅程不同阶段会使用不同导航工具,前期依赖地磁场判断大致的方向,后期通过地标对实际方向进行修正,太阳高度也会影响鸽子导航。研究表明,鸽群编队系统与狼群等 陆地群体的模式区别甚大,在鸽群中,所有的鸽子包括头鸽及跟随鸽都存在层次等级,区别是头鸽的地位不容撼动,为群体的绝对领导者,跟随鸽只能服从上层,跟随鸽所受影响来自于头鸽及其上层鸽,而来自于上层鸽的影响实时性更高、效果更强。
无人机编队集群类脑导航的研究者从鸽群层级行为得到了很多启发,表现为:
1)鸽群编队系统区别于陆地群体的单一首领制度。原因是视野及通讯最高距离的限制,鸽子只能与临近上层的鸽子实时通讯并相对跟随。无人机编队类脑协同导航系统的研究受此启发,由于长机不能时刻在僚机的通讯及视野范围内,采用长机与僚机通讯、僚机与僚机通讯的方式实现编队飞行;
2)鸽群个体间不是任意两鸽均可通讯联系,而是具有森严制度。无人机编队类脑协同导航系统的研究受此启发,采用类似等级制度,可以增强集群通讯的可靠性,即使出现干扰甚至故障,仍可迅速实现集群系统重构,使系统不受影响; 而且各无人机个体的通讯空间可大幅度减少。
2.3 类脑导航智能自适应建模的发展现状
未来类脑导航的主要发展趋势之一是类脑认知,认知智能导航可以使智能导航系统进行理解与思考,在复杂环境下快速识别附近环境,自我判断最优路径。典型例子有谷歌 DeepMind 的最新研究,其中文献[8]说明了强化学习训练的深度神经网络在导航方面,仍不能与人脑的空间行为的熟练度相媲美的原因是缺乏内嗅皮层网格细胞的支撑,网格细胞可以提供一个多维度周期表示基础,其作用类似于编码空间,并且对于路径集成( 集成自运动) 及计划直接轨迹到目标( 基于矢量的导航) 有重要作用。实验证明,网格单元自发地出现在神经网络中,使智能体获得空间自导航能力,这与在哺乳动物中观察到的神经活动模式惊人的一致,也与网格细胞为空间提供高效代码的观点一致。
研究者首先利用网格细胞的计算功能设计一种类脑深度强化学习单元,训练一个具有长短期记忆 ( LSTM) 架构的循环网络,使之出现类似于网格细胞的特征,以及其他内嗅皮层细胞特征。速度作为输入提供给该循环网络,该网络随时间的反向传播进行训练,允许网络动态地将当前输入信号与反映过去事件的活动模式组合。正如预期的那样,网络能在涉及觅食行为的环境中准确进行路径整合,其中25.2%的线性层单元类似于网格单元,在保守的场改组程序产生的零分布中表现出来显著的六边形活动模式,与啮齿动物网格细胞的经验结果一致。线性层还表现出类似于头部方向单元( 10.2%) ,边界单元( 8.7% ) 和少量位置单元以及这些表示的连接单元。为了确定这些表示的稳健性,文献[5-6]表明对网络进行了100次重新训练,每次都找到类似比例的网格状单元( 平均23%, s.d.2.8% ,具有显著网格特征的单元) 和其他空间调制单元。
为了开发具有矢量导航潜力的智能体,文献[8]将上述“网格网络”整合到一个用深度强化学习训练的更大的架构中。和以前一样,网格网络是使用监督学习训练的,如图6所示,但为了更好地近似可用于导航哺乳动物的信息,它现在接收受随机噪声和视觉输入扰动的速度信号。发现智能体能在有挑战性的、不熟悉的、变化的环境中定位目标,具有类似于网格特征的智能体的性能超过了人类专家和其他对比个体,其基于矢量的导航所需的度量尺度来自于网络中的网格状单元。而且,网格细胞的特征使得智能体能够执行与哺乳动物类似的走捷径的行为。研究结果表明,网格状单元为个体提供了欧几里德空间度量和相关的向量运算,为精确导航提供了基础。因此,结果支持将网格单元视为基于矢量导航的关键的神经科学理论,证明后者可以与基于路径的策略相结合,以支持在具有挑战性的环境中进行导航。
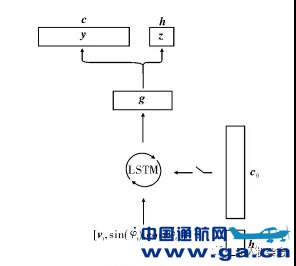 有监督学习实验中的网络框架
网格单元的循环层是具有128个隐层单元的LSTM,该循环层的输入为向量[v,sin(φ) ,cos(φ) ],初始时刻的地面真实位置,活动c0和头朝向活动 h0 分别经过线性变换后得到 LSTM的初始单元状态和隐藏状态的初始化值 l0和m0.LSTM的输出是一个经过正则化的线性层,该线性层的输出gt是由线性变化得到的,并通过两个softmax函数计算出预测的头朝向单元活动zt和位置单元活动yt。研究表明线性层激活gt中含有网格状单元及头朝向状单元。
传统的同步定位与建图(SLAM) 技术通常需要构建准确且完整的地图,从外部定义目标的性质和位置。相比之下,文献[8]中描述的深度强化学习方法能够从稀疏奖励中端到端地学习复杂的控制策略,以超过以往深度强化学习方法的自主能力直接引导个体到达目标甚至采用走捷径的方式,而这些若在SLAM系统中则需要手动编码。文献[9]中提出了一种解决城市级现实环境中任务的深度强化学习导航方法,并分析了一项新的信使任务,提出了一个多城市网络智能体架构,演示了该如何将神经网络迁移到新的环境。
目前有4点需要进一步研究:
1)如果神经网络的损失函数中不包括正则项,那么神经网络无法表现出网格细胞功能,这一发现给了我们一个全新的角度去思考正则项的作用;
2)深度神经网络的黑盒特性阻碍了进一步分析网格细胞活动特性对路径整合的作用,由于无法在模型内进行原理分析、定性定量分析算法和编码策略,使得研究网格细胞成为有效的导航方案异常困难,这一点再次强调了研究神经网络的必要性以及神经科学家的重要性;
3)还需要进一步分析深度学习系统的内部工作机理,研究辅助类脑之空间导航的通用计算原理;
4)目前只涉及了单个智能体的类脑导航,编队类脑方面,只涉及到了与人工智能相关的导航,但离真正的类脑还是有一定距离。
|


