
|
ЖШ№вМЁ ЧўТв·АЖӯ НшЖШМмГЁөкё»ГАҪрКўјТҫУЧЁУӘөкҝУГЙ№ХЖӯЖЫХ©Пы·СХЯ
¶аРэТнОЮИЛ»ъКТДЪЧФЦчҝШЦЖУлЧФЦчөјәҪУлНвІҝКУҫх ¶аРэТнОЮИЛ»ъҫЯУРҪб№№јтөҘЎўҝШЦЖБй»оЎў»ъ¶ҜРФЗҝЎўҙ№ЦұЖрҪөәН·ЙРР°ІИ«өИМШөгЈ¬ЖҫҪиЖдБјәГөД»ъ¶ҜРФЎўУЕФҪөДРьНЈәНөНЛЩ·ЙРРРФДЬКЬөҪ№г·ә№ШЧўЈ¬¶аРэТнөД·ўХ№ТАИ»ҙжФЪЧЕәЬ¶аөД№ШјьјјКхөДМфХҪЎЈ
ОӘКІГҙТӘСРҫҝОЮИЛ»ъКТДЪЧФЦчҝШЦЖУлЧФЦчөјәҪЈҝ
ҙ«НіөДОЮИЛ»ъНЁіЈК№УГ№ЯРФөјәҪПөНіЈЁINSЈ©әНИ«Зт¶ЁО»ПөНіЈЁGPSЈ©ПаҪбәПөД·ҪКҪКөПЦОЮИЛ»ъөД¶ЁО»УлөјәҪЎЈө«КЗФЪТ»Р©»·ҫіПВЈ¬УЙУЪҪЁЦюОпөДХЪөІ»тХЯОЮПЯөзёЙИЕөИТтЛШөДҙжФЪЈ¬өјЦВGPSРЕәЕИхЈ¬ЙиЦГУРөДКұәтНкИ«І»ҝЙУГЈ¬ЛщТФСРҫҝТ»ЦЦОЮGPS»·ҫіПВөДөјәҪ·ҪКҪіЙОӘДҝЗ°өДСРҫҝЦРРиТӘ№ҘҝЛөДјјКхДСМвЎЈ
ОӘКІГҙФЪСРҫҝОЮИЛ»ъКТДЪЧФЦчҝШЦЖәНЧФЦчөјәҪКұТӘУГөҪНвІҝКУҫх№ӨҫЯЈҝ
УЙУЪКТДЪ¶аРэТнОЮИЛ»ъөД№ЯРФөјәҪПөНіөДБгЖҜСПЦШЈ¬ФЪ¶МКұјдДЪУРәЬёЯөД¶ЁО»ҫ«¶ИЎЈө«КЗЛжЧЕКұјдөДСУіӨЈ¬ОуІо»эАЫК№өГІвБҝҫ«¶ИІ»¶ПҪөөНЈ¬І»ТЛөҘ¶АК№УГЈ¬РиТӘУлЖдЛьҙ«ёРЖчЕдәПК№УГЎЈ
ФЪ¶ФОЮИЛ»ъ·ЙРРҝШЦЖПөНіҪшРРҝӘ·ўКұЈ¬№ӨіМКҰРиТӘ¶ФҝХЦРРьНЈЎў·ЙРРЦРұЬХПЎў»ъЙнЧЛМ¬ҝШЦЖЎў¶ЁО»ЎўЧЕВҪөИ№ҰДЬҪшРРҝӘ·ўәНІвКФЈ¬ТтҙЛ№ӨіМКҰРиТӘТ»°С№ӨЧчФЪИэО¬ҝХјдЦРөДіЯЧУЈ¬КөКұ¶ФОЮИЛ»ъФЪҝХјдЦРөДёЯ¶ИЎўО»ЦГЎўЧЛМ¬Ўў¶¶¶ҜЎўСУКұөИЦёұкҪшРРІвБҝЈ¬ТФМбЙэҝӘ·ўР§ВКЎЈФЪ¶ФОЮИЛ»ъЎўОЮИЛіөөИЦЗДЬМеҪшРРёЯҫ«¶Иұа¶УКұЈ¬№ӨіМКҰРиТӘ№№ҪЁТ»ёцҝХјдІвБҝ»щЧјЈ¬ёГ»щЧјҝЙТФКөКұҫ«И·ІвБҝГҝёцЦЗДЬМеФЪҝХјдЦРөДО»ЦГәНЧЛМ¬Ј¬ІўНЁ№эФЛРРУРҝШЦЖИнјюЈЁИзROSЈ©өДјЖЛг»ъПВҙпұа¶УЦёБоЎЈ
ОЮИЛ»ъЧФЦчөјәҪЦРЈ¬ОЮИЛ»ъФЛ¶ҜЧҙМ¬К¶ұрКЗОЮИЛ»ъәҪјЈФӨІвөД»щҙЎЈ¬¶ФОЮИЛ»ъҝХ№ЬПөНіөД№№ҪЁҫЯУРЦШТӘТвТеЎЈОЮИЛ»ъөДФЛ¶ҜЧҙМ¬ҝЙјт»ҜОӘјёёцұкЧјЧҙМ¬Ј¬ИзөИЛЩЧҙМ¬ЎўөИјУЛЩЧҙМ¬әНРӯөчЧӘНдЧҙМ¬өИЎЈОЮИЛ»ъөДХжКө·ЙРР№эіМҝЙТФИПОӘКЗУЙІ»Н¬ФЛ¶ҜЧҙМ¬ЧйәП»тЧӘ»»¶шіЙөДЎЈНЁ№эИ·¶ЁОЮИЛ»ъөДФЛ¶ҜЧҙМ¬Ј¬ҝЙТФ¶ФОЮИЛ»ъәҪјЈҪшРРФӨІвЈ¬Ҫш¶шЖА№АОЮИЛ»ъФЛРР·зПХЎўҪЁБўја№ЬПөНіәНФӨҫҜПөНіЎЈө«ОЮИЛ»ъХжКөФЛРР»·ҫіёҙФУЈ¬№ЫІвКэҫЭФЪ№ЫІвәНКэҫЭБҙҙ«Кд№эіМЦР°ьә¬Т»¶ЁФлЙщЈ¬ДСТФНЁ№эјтөҘөДгРЦөИ·¶ЁОЮИЛ»ъөДФЛРРЧҙМ¬ЎЈЛщТФРиТӘТ»ёцҫ«ЧјөДНвІҝКУҫх¶ФЖдФЛ¶ҜЧҙМ¬ҪшРРІвБҝЎЈ
УРДДР©НвІҝКУҫх№ӨҫЯЈҝ
№вС§¶ҜІ¶ПөНіЎўҝнҙшјјКхЈЁUltra-WideBandЈ¬UWBЈ©¶ЁО»Ј¬јӨ№в¶ЁО»Ўўі¬ЙщІЁ¶ЁО»өИЎЈ
НвІҝКУҫх№ӨҫЯУРДДР©УЕБУКЖЈҝ
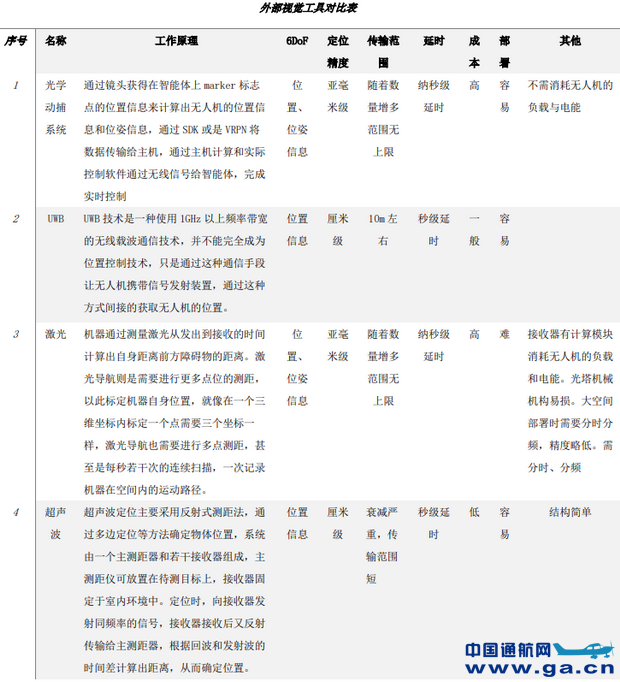 УЙ¶ФұИұнҝЙТФҝҙіцЈ¬ФЪ№вС§¶ҜІ¶КЗ¶Ф¶аРэТнОЮИЛ»ъКТДЪЧФЦчҝШЦЖУлЧФЦчөјәҪСРҫҝЦР№вС§¶ҜІ¶ПөНіКЗЧоУЕЦКөДСЎФсЎЈ
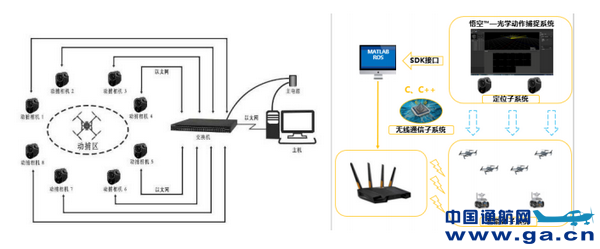
ОтҝХ™№вС§¶ҜІ¶ПөНі
№ӨЧчФӯАн:
ҫ«ЧјјЗВјФЛ¶ҜРЕПўЈ¬»щУЪјЖЛг»ъКУҫхФӯАнЈ¬№вС§КТДЪ¶ЁО»ПөНіНЁ№эІјЦГФЪҝХјдЦРөД¶аёцәмНвЙгПс»ъІ¶ЧҪЗшУтДЪОпМеЙП·ҙ№вұкК¶өгөДФЛ¶ҜРЕПўЈ¬ІўТФНјПсөДРОКҪјЗВјПВАҙЎЈ
КөКұҪвЛгБщЧФУЙ¶ИО»ЧЛЈ¬АыУГјЖЛг»ъ¶ФІ¶ЧҪөҪөДНјПсКэҫЭҪшРРҙҰАнЈ¬КөКұөШҪвЛгіцФЛ¶ҜОпМеөДБщЧФУЙ¶ИО»ЧЛЈ¬јҙИэЧФУЙ¶ИО»ЦГЈЁX,Y, ZЧшұкЈ©әНИэЧФУЙ¶ИЧЛМ¬ЈЁё©СцҪЗЈ¬Ж«әҪҪЗәН№цЧӘҪЗЈ©ЎЈёГПөНіТІҝЙТФіЖОӘ“КТДЪ¶ЁО»ПөНі”»т“КТДЪGPS”ЎЈ
¶ајЬПа»ъЦ§іЦЈ¬ёІёЗ·¶О§№гЈ¬№вС§КТДЪ¶ЁО»ПөНіІЙУГЦЗДЬПа»ъЈ¬Ҫ«·ҙ№вЗтНјПсЧшұкҙ«өҪЦч»ъЈ¬І»Н¬Па»ъКэДҝҪ«ІъЙъІ»Н¬өДёІёЗ·¶О§Ј¬Па»ъФҪ¶аЈ¬ёІёЗ·¶О§ФҪҙуЎЈ
 УІјюІОКэ
  TРНұк¶ЁёЛёЁЦъФЛ¶ҜІ¶ЧҪПөНіөДРЈЧјLРНұк¶ЁЦұҪЗёЁЦъФЛ¶ҜІ¶ЧҪПөНіЦРРДөгЕдЦГ
ИнјюІОКэ
 1Ўў»щҙЎ№ҰДЬ
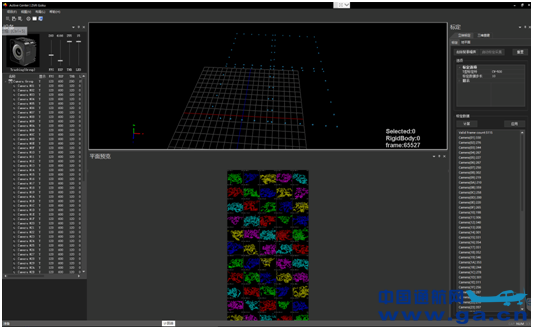
1Ј©Ц§іЦЦРОДөД¶аУпСФЎў¶аКУҪЗЎў¶аҙ°ҝЪ3DПФКҫІЩЧчҪзГж
2Ј©ҝЙН¬Кұ¶Ф¶аҙпКэ°ЩМЁGoku™ CameraҪшРРјҜЦР№ЬАн
3Ј©¶ФКУҫх№ЯРФН¬ІҪҝШЦЖЖчҪшРР№ЬАн
4Ј©ёЯР§КөКұКУҫхИэО¬ЦШҪЁТэЗж
5Ј©№вС§№ЯРФЙо¶ИИЪәПТэЗж*
6Ј©¶аҙпКэ°ЩёцЦЗДЬ№вС§ёХМеҙҙҪЁЎўұк¶ЁЎў№ЬАн
7Ј©КөКұОпМеЧ·ЧЩҪвЛгј°»жЦЖ
8Ј©КэҫЭјЗВјј°»Ш·Е
9Ј©ҝХјдІ¶ЧҪЗшУтКөКұІвЛгј°»жЦЖ
10Ј©№ъјКБмПИөДIKЛг·Ё
11Ј©КөКұКэҫЭБчКдіц
12Ј©КэҫЭјЗВјј°»Ш·Е
*ҪцФЪ№ЯРФПөНіІҝКрКұУҰУГ
|


