
|
曝光台 注意防骗 网曝天猫店富美金盛家居专营店坑蒙拐骗欺诈消费者
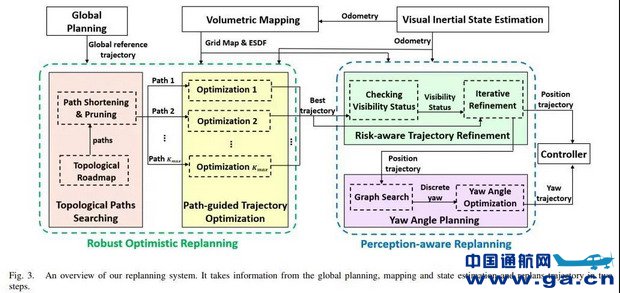
本文所提出的重规划系统如图 3 所示。该算法利用全局规划、密集映射和状态估计模块的输出,对全局参考轨迹进行局部修改,以避免先前未知的障碍物。
重规划分两步进行:首先,稳健的 optimistic 重规划通过路径引导优化并行生成多个局部最优轨迹。优化是通过从拓扑路径搜索中提取并精心选择的拓扑独特路径来引导的。在这一步中采用 optimistic 假设。第二步是利用 perception-aware 规划策略。在这一步骤中,局部最优轨迹中的最佳轨迹通过风险感知轨迹精化进一步细化,提高了其在未知和危险空间中的安全性和可见性。在优化轨迹的基础上,偏航角得到规划,以主动探索未知环境的内容。
 研究者通过基准比较和具有挑战性的现实世界实验,对所提出的 perception-aware 规划策略和整个规划系统进行了系统的评估。结果表明,perception-aware 规划策略能够在传统方法无法保证安全的、具有挑战性的场景中,支持快速和安全的飞行。此外,整个规划系统在快速飞行任务的几个方面都优于 SOTA 方法。在复杂环境中进行的大量室内外飞行试验也验证了该规划系统的有效性。
 |


