
|
曝光台 注意防骗 网曝天猫店富美金盛家居专营店坑蒙拐骗欺诈消费者
如下图所示,单一的图片具有很强的迷惑性和不确定性
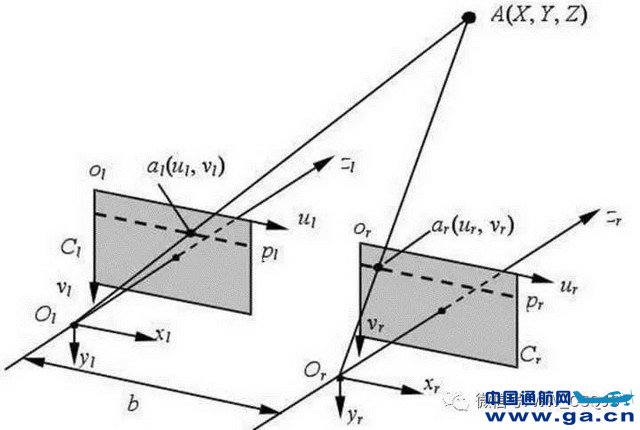
 双目立体视觉犹如3D电影(左右眼看到的场景略有差异),能够直接给人带来强烈的空间临场感。类比机器视觉,从单个摄像头升级到两个摄像头,即立体视觉(Stereo Vision)能够直接提供第三个维度的信息,即景深(depth),能够更为简单的获取到三维信息。双目视觉最常见的例子就是我们的双眼:我们之所以能够准确的拿起面前的杯子、判断汽车的远近,都是因为双眼的双目立体视觉,而3D电影、VR眼镜的发明,也都是双目视觉的应用。
双目视觉的基本原理是利用两个平行的摄像头进行拍摄,然后根据两幅图像之间的差异(视差),利用一系列复杂的算法计算出特定点的距离,当数据足够时还能生成深度图。
 其实,各个避障技术在无人机上都有用武之地,只是应用场景有所不同,特别对于前视避障而言,有些技术就不适用了。
红外和超声波技术,因为都需要主动发射光线、声波,所以对于反射的物体有要求,比如:红外线会被黑色物体吸收,会穿透透明物体,还会被其他红外线干扰;而超声波会被海绵等物体吸收,也容易被桨叶气流干扰。
而且,主动式测距还会产生两台机器相互干扰的问题。相比之下,虽然双目视觉也对光线有要求,但是对于反射物的要求要低很多,两台机器同时使用也不会互相干扰,普适性更强。
最重要的是,常见的红外和超声波目前都是单点测距,只能获得特定方向上的距离数据,而双目视觉可以在小体积、低功耗的前提下,获得眼前场景的比较高分辨率的深度图,这就让避障功能有了更多的发展空间,比如避障之后的智能飞行、路径规划等。
激光技术虽然也能实现类似双目视觉的功能,但是受限于技术发展,目前的激光元件普遍价格贵、体积大、功耗高,应用在消费级无人机上既不经济也不实用。
无人机避障实现的难点
避障功能从构思到实现,走的每一步几乎都便随着无数的难题。仅仅是写出有效的视觉识别或者地图重构的算法还只是第一步,能让它在无人机这样一个计算能力和功耗都有限制的平台上流畅稳定的跑起来,才是真正困难的地方。
  此外,如何处理功能的边界也是一个问题,比如双目视觉在视线良好的情况下可以工作,那么当有灰尘遮挡的情况下呢?这就需要不断的实验和试错,并且持续的优化算法,保证各项功能在各类场景下都能正常工作,不会给出错误的指令。
避障功能作为近年来无人机产品的大趋势,带来的最直接的好处就是,以往一些人为疏忽造成的撞击,现在都能经由避障功能去避免,既保障了无人机飞行安全的同时,也避免了对周围人员财产的损害,让飞无人机的门槛进一步得到了降低。
而长远来看,无人机想要普及到农业、建筑、运输、媒体等领域,「智能化」肯定是必经之路。
毕竟只有在飞行功能上做到智能控制,才有余量去满足不同行业的需求。如今由“避障功能”而衍生出的一系列“智能飞行”功能,无疑就是“无人机智能化”的阶段性体现之一。
中国通航网 www.ga.cn
通航翻译 www.aviation.cn
本文链接地址:无人机自动避障技术盘点(3)
|


